


밀집된 창고 보관을 위한 중요한 운송 장비인 지능형 팔레트 유형 4방향 셔틀 차량은 지능형 트랙 유도 자동 반전 및 트랙 변경 운송 장비입니다. 전기 제어 시스템의 제어하에 인코더, RFID, 광전 센서와 같은 디지털 기술을 통해 각 입력 및 출력 스테이션의 위치를 정확하게 찾아내고 지능형 스케줄링 시스템을 갖추고 있습니다. 자재 수령 후 자동으로 왕복 이동하여 운송합니다. 팔레트 4방향 차량은 사람의 조작이 필요하지 않으며 빠른 주행 속도와 높은 수준의 지능으로 다양한 물류 보관 시스템에 적합하며 단위 자재의 평면 자동 운송을 신속하게 실현할 수 있습니다. 지능형 스케줄링 시스템을 기반으로 다층 및 다중 차량 협업 병렬 작업을 구현하여 정확하고 효율적인 작업 모드를 달성하고 기업 물류 보관 시스템을 위한 새로운 물류 솔루션을 제공합니다.
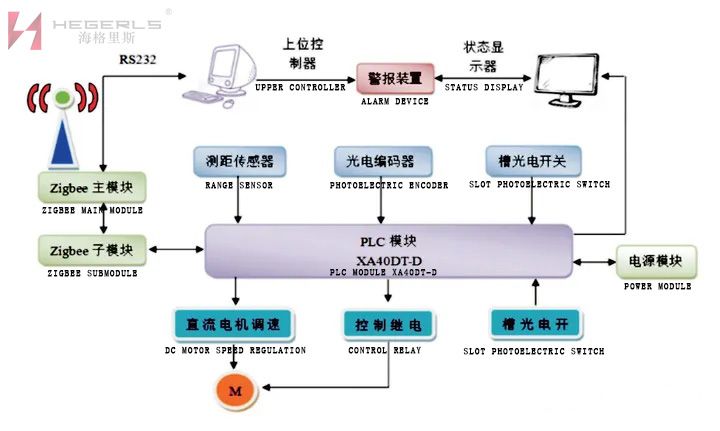
지능형 트레이 4방향 셔틀 차량 보관 시스템 구현의 주요 어려움과 요점은 하드웨어 신뢰성, 통신 및 측위 기술, 스케줄링 시스템 등에 있습니다. 특히 하드웨어 신뢰성 측면에서 Hebei Woke HEGERLS는 주로 제품 신뢰성을 달성합니다. 세 가지 측면에서. 첫째, 차체에 16개의 센서가 구성되어 차량 작동을 실시간으로 모니터링합니다. 다음으로 제어 안정성을 향상시키기 위해 Siemens s7-200 SMATER 시리즈에서 표준 PLC를 선택합니다. 또한, HEGERLS 팔레트 4방향 셔틀은 전체적으로 모듈식 설계를 채택하여 부품 고장 시 교체가 더욱 편리하고 효율적입니다. 동시에 다른 소형차도 지원을 제공하는 것이 편리합니다. 모든 구조 부품은 Hebei Woke에서 독립적으로 개발 및 생산되어 품질과 정확성을 엄격하게 관리합니다.
통신 및 위치 지정 기술 측면에서 고밀도 상품 및 선반은 일반적으로 통신 신호 전송을 방해하여 팔레트 4방향 셔틀 및 해당 시스템의 데이터 교환 효율성에 영향을 미치고 부정확한 위치 지정 및 위치 손실로 이어집니다. 다양한 실제 상황에 따라 Hebei Woke는 창고 내 4방향 셔틀 차량의 원활한 로밍을 실현하고 간섭 방지를 개선하기 위해 인코더 위치 지정, 레이저 위치 지정, 바코드/2차원 코드 위치 지정, RFID 위치 지정 및 기타 위치 지정 방법을 선택했습니다. 차량의 성능을 자동으로 로드 밸런싱하여 단일 실패 지점을 제거합니다.
스케줄링 시스템 측면에서 다중 차량 스케줄링 시스템을 구현해야만 4방향 셔틀 차량의 적용 가능성이 크게 향상될 수 있습니다. HEGERLS 4방향 셔틀 다중 차량 스케줄링 시스템에는 우주 교통 제어, 작업 할당, 장비 작동 오류 분석 및 경로 계획의 네 가지 측면이 포함됩니다.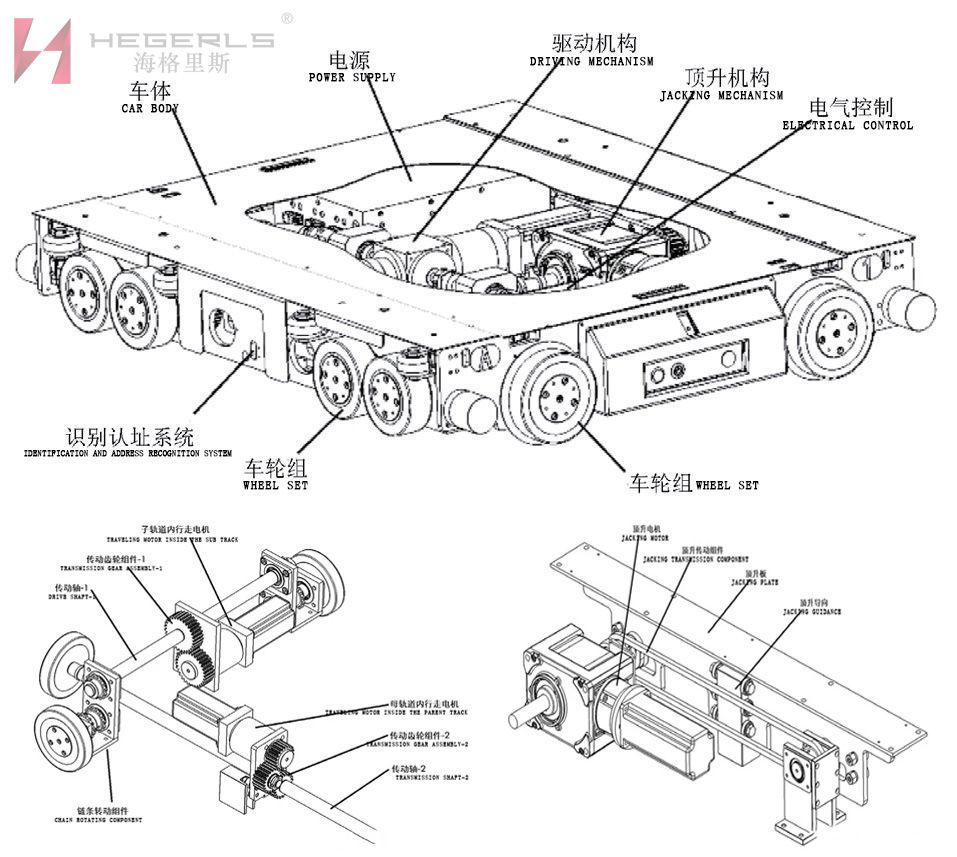
Hebei Woke가 독자적으로 개발하고 생산한 HEGERLS 팔레트 4방향 셔틀카의 전반적인 메커니즘 설계도 다른 제조업체와 다릅니다. HEGERLS 팔레트 4방향 셔틀카의 주요 메커니즘 설계는 다음과 같습니다.
작업 요구 사항에 따라 4방향 차량은 왕복 엘리베이터와 협력하여 주행 트랙을 통해 선반의 다양한 층과 화물 차선에서 작업 작업을 완료합니다. 창고 모니터링 시스템의 제어 및 일정 관리에 따라 전체 밀도가 높은 창고는 다층 및 다중 차량 동시 운영을 달성할 수 있습니다. 각 4방향 차량은 운행 중에 위치, 속도, 전기, 가용성, 결함 및 작업 조건과 같은 정보를 정보 관리 시스템에 업로드할 수 있습니다. 4방향 차량에는 대량 보관 및 검색, 화물 이동, 팔레트 계산 등의 기능이 있어 신속한 자재 배송 및 재고 관리가 가능합니다. 내부에는 장애물 회피 기능과 오류 경보 프롬프트 기능이 탑재되어 있어 안전 보호와 오류 정보의 적시 피드백을 제공할 수 있습니다. 하드웨어 시스템 관점에서 볼 때 4방향 차량은 주로 프레임, 리프팅 메커니즘, 구동 메커니즘, 휠 그룹, 전원 공급 장치, 전기 제어 등과 같은 구성 요소로 구성됩니다.
1) 차량구조
고품질의 스틸을 조합해 완성한 4방향 차량의 차체 구조에 모듈러 설계 기술이 적용됐다. 차량의 설계적재하중은 1500kg 이상이며, 최소 안전율은 1.6을 권장합니다. 재료 항복 강도는 2.75 MPa입니다. 4방향 차체 구조는 차량 전체의 신뢰성과 구조의 경량화를 위해 최적화되었습니다.
2) 잭킹 메커니즘
4방향 차량 작동에는 여러 개의 하향식 및 후진 동작이 필요하며 기계적 메커니즘 또는 유압식 하향식 장치가 설계되어야 합니다. 기계구조의 안전성, 신뢰성, 내구성을 고려하여 리프팅 스트로크 40mm, 리프팅 시간 3~5초를 권장합니다. 4방향 차량은 팔레트를 올리고 내리고 상품을 들어올리는 과정을 반대로 하여 하나의 작업 주기를 완료합니다. 운행 효율을 높이려면 운행 과정에서 4방향 차량이 빠르게 하강 및 후진을 하여 운행 주기를 단축할 수 있도록 보장해야 합니다.
3) 구동 메커니즘 및 바퀴
4방향 차량 구동 메커니즘은 서보 모터 구동, 유성 감속 및 정류자를 채택하여 양방향으로 빠른 정류를 촉진합니다. 정상적인 작동 조건에서 무부하 작동 속도는 1.4m/s~1.6m/s이고 최대 부하 작동 속도는 1.0m/s~1.2m/s입니다. 선반 위에서 수평 주행 시 4방향 차량은 X 방향 4륜 구동, Z 방향 8륜 구동을 채택합니다. 8륜(구동 및 구동 휠 조합) 변속기 모드는 시스템 설계 요구 사항을 충족하도록 선택되어 차량 보행의 안정성을 보장하는 동시에 내부 기계 시스템의 복잡성을 줄입니다. 4방향 자동차가 움직일 때 바퀴는 장기간 마찰을 받기 때문에 내마모성 바퀴가 필요합니다. 성능 테스트 후 내구성, 소음 감소 및 작동 안정성 보장을 위해 폴리우레탄 휠을 선택합니다.

Hagrid HEGERLS 팔레트 4방향 셔틀의 유연한 다층 및 다중 차량 작동 모드는 인바운드 및 아웃바운드 작업의 효율성을 크게 향상시켜 스태커가 한 차선에서만 출입할 수 있는 기존 3차원 창고의 병목 현상 문제를 해결합니다. . 최근 몇 년간 국내외 창고 시장의 실제 수요를 바탕으로 Hebei Woke는 참신한 외관, 완전한 기능, 안전성 및 신뢰성과 같은 기술적 이점을 갖춘 팔레트 4방향 셔틀 차량을 개발했습니다. 국내외 애프터 서비스 시스템 외에도 Hebei Woke는 앞으로 지능형 창고 개발의 강력한 추진력을 확고히 파악하고 항상 고객 요구 지향을 준수하며 고객에게 높은 지능과 의사 결정을 지속적으로 제공할 것입니다. 창고 종합 솔루션.
게시 시간: 2023년 5월 19일